Actuator
ROBOT MODULE
개요
로봇 모듈은 로봇의 관절이나 구동부를 움직이는 핵심 구성요소로 모터, 감속기, 센서, 제어기가 통합된 고성능 유닛
정밀한 제어와 높은 토크를 요구하는 로봇 설계에 최적화
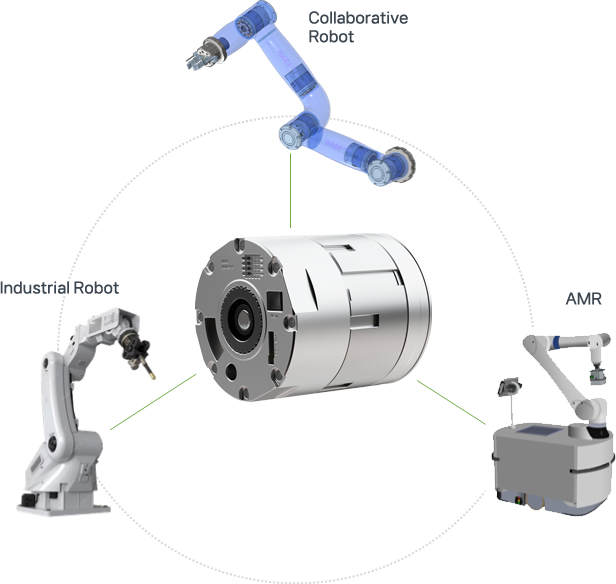
Robot Module Series
| Driving Module | Joint Module | |
|---|---|---|
 |
 |
|
| 구분 | AMR 바퀴 구동용 모듈 | 로봇 관절용 모듈 |
| 기능 | AMR 이동 및 제어 | 로봇암 모션 제어 |
| 주요 동작 | 연속 회전 | 양방향 회전 (정밀 제어, 위치 유지) |
| 특징 | 속도·내구성·효율성 중심설계 | 정밀도·토크·응답성 중심설계 |
| 제어 방식 | 속도제어 | 위치, 토크제어 |
| 적용 예시 | AMR/AGV 휠, 전동휠체어 등 | 협동로봇, 산업용 로봇, 휴머노이드로봇 등 |
특징 및 구성
로봇 모듈는 로봇의 관절이나 구동부를 움직이기 위한 핵심 구성 요소로, 다음과 같은 부품들이 결합되어 있는 시스템입니다.

Adapter
- 위치정밀도 확보를 위한 스플라인 결합.
- 적용분야에 따라 커스텀 어댑터 설계 가능.
Friction Brake
- 로봇 하중 대비 안전계수 여유 확보
- 브레이크 온/오프 응답시간 단축
- 마찰패드 마모, 온도 영향, 잔류토크 최적화.
- 비상정지 시 열손상 방지(1~2회 정지용).
Gear Reducer
- 내구성이 높고 백래시 최소화(1~5 arc-min).
- 비틀림강성이 높아 정밀제어에 적합.
- 베어링 프리로드, 열팽창 여유확보.
- 감속비: 1:50 ~ 1:160
Absolute Encoder
- 관절의 절대 위치(각도)를 고해상도로 검출
- 전원 재기동 시에도 제로점 유지.
- 광학식(Optical)
- 해상도: 17~22 bit
- EMI 차폐, 제로 보정
Casing
- 알루미늄 합금적용.
- 베어링 시트, 스테이터 고정 슬롯, 케이블 통로 포함.
- IP65등급 확보.
- 구조강성 vs 경량화 밸런스 확보.
- 모터 발열 해소용 열경로 내장.
Torque Sensor
- 감속기 출력축에 전달되는 실제 토크를 측정.
- 스트레인게이지형
- 자기유도형(비접촉식)
- 정격토크 범위 내 선형성 보장.
- 영점보정 및 캘리브레이션.
BLDC Motor
- 고극수 설계로 토크밀도 높음.
- 냉각 구조 반영.
- 로터 동심도 정밀공차 적용.
DC Inlet
- DC 입력, 엔코더 신호, 브레이크 제어, 토크센서출력의 통합제어.
- 하네스 진동 내구성확보 및 체결 토크 최적화
- 방수기능(IP65)
관련 문의
노태원 PM (nenun@naraauto.com)